首都高初の夜間におけるドローンを活用した点検に向けた実証実験の実施
~ 災害時等における遠隔地からの迅速な点検手法の確立に向けた取り組み ~
2025年 3月17日
首都高速道路株式会社
首都高技術株式会社
株式会社JDRONE
エアロセンス株式会社
KDDIスマートドローン株式会社
NTTコミュニケーションズ株式会社
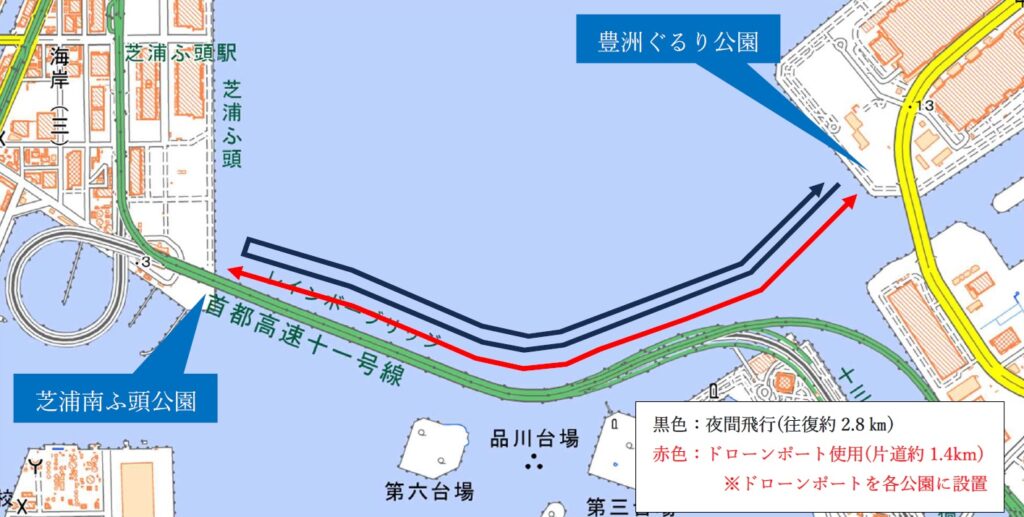
首都高速道路株式会社(本社:東京都千代田区、代表取締役社長:寺山 徹)、首都高技術株式会社(本社:東京都港区、代表取締役社長:加古 聡一郎)、株式会社JDRONE(本社:東京都新宿区、代表取締役社長:大橋 卓也)、エアロセンス株式会社(本社:東京都北区、代表取締役社長:佐部 浩太郎)、KDDIスマートドローン株式会社(本社:東京都千代田区、代表取締役社長:博野 雅文)、NTTコミュニケーションズ株式会社(本社:東京都千代田区、代表取締役社長:小島 克重)は、災害時等における迅速で確実な点検手法の確立を目的に、ドローンを活用した往復約2.8kmの自動飛行等の実証実験(以下、本実証)を首都高速道路の長大橋であるレインボーブリッジにて 2月14日(金)に実施しました。
本実証では、夜間の災害発生を考慮し、「夜間飛行時における映像視認性確認の実証」や「自動でドローンの離着陸・充電ができるドローンポートを複数使用し、ポート間を往復する長距離飛行の実証」を行い、ドローンで撮影した映像を用いた災害時等における点検手法の有用性を確認しました。

首都高速道路では大規模災害発生時における迅速な点検による早期の道路啓開を目指し、これまでドローンを活用した点検手法を実証(注1、注2)してまいりました。そして今般、災害は昼夜関係なく発生する可能性があることから、夜間に災害が発生したことを想定し、本実証を実施しました。
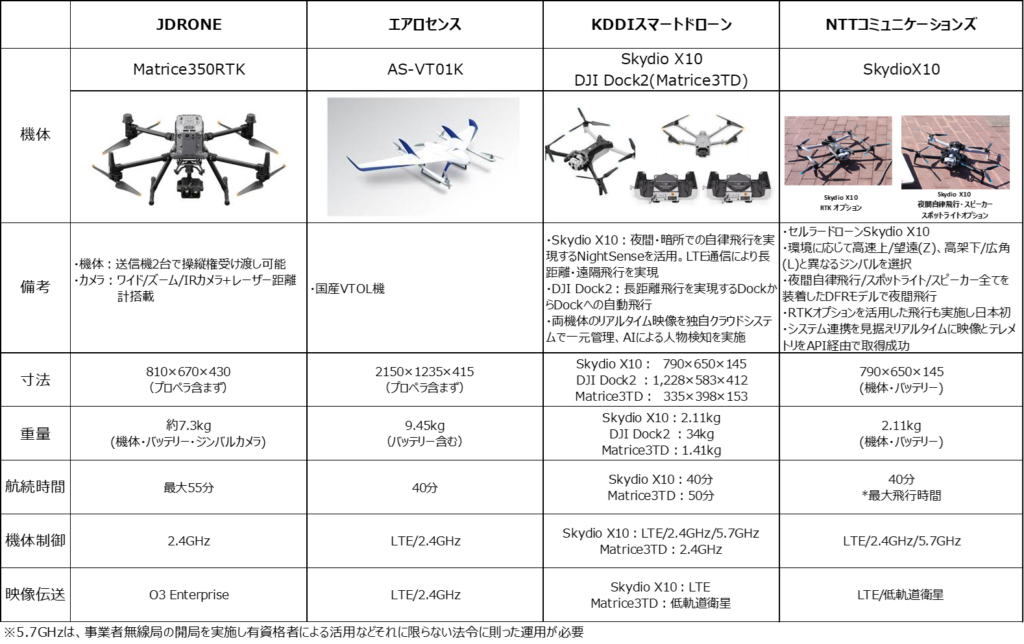
・ VTOL型(注3)ドローンにより夜間の高速道路上空付近を飛行撮影(エアロセンス)
・ 暗所での自律飛行を得意とするドローンを活用し、高速道路上空付近を飛行撮影(JDRONE・
KDDIスマートドローン・NTTコミュニケーションズ)
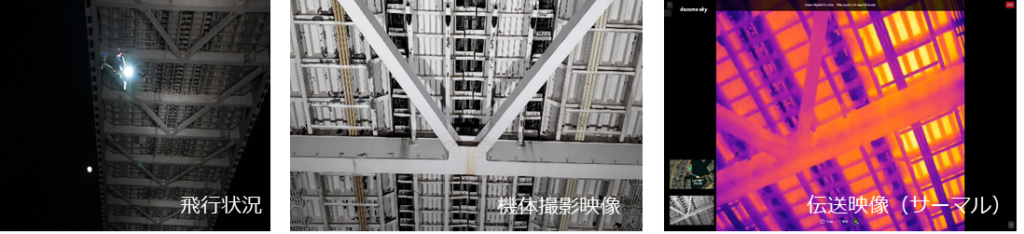
・ 目視点検が困難な高架下での暗所点検飛行(NTTコミュニケーションズ)
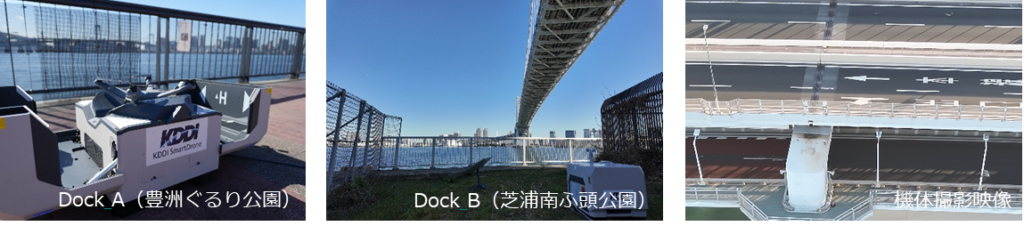
・ ドローンは通信とバッテリーの関係で飛行距離が限られるため、複数のドローンポートを使用することによる
飛行距離の長距離化(KDDIスマートドローン)
本実証の結果、夜間災害発生時の暗所での飛行における機体選定や点検手法および複数のドローンポートを使用する点検手法の確立に向けて有益な検証結果を得ることが出来ました。
一方で、安定した飛行制御・映像配信を目的とした、災害時の即時点検候補エリアの電波環境の調査および使用電波の選定等、より実践的な運用に向けた課題を確認しています。
今後も、本実証結果を踏まえ、迅速かつ確実に点検を行うために多様な点検手法の確立と体制構築に取組んでまいります。
注1:VTOL(垂直離着陸型固定翼)型ドローンと無人ヘリを用いて中央環状線(葛西JCT~小松川JCT)の
往復14kmの長距離自動飛行による高速上点検の実証実験(2023年1月)などを継続的に実施
注2:ドローンポートを使用した自動飛行による高速上点検の実証実験(2024年1月)
注3:VTOL(垂直離着陸型固定翼)型ドローンは回転翼機のようにホバリングしながら垂直に離着陸し、
上空では固定翼機として水平飛行を行うため、滑走路を使わずに長距離の飛行が可能
実証実験の概要
【概要】
日時:2025年 2月14日(金) 午前11時~翌午前2時
場所:レインボーブリッジ(高速11号台場線)
項目:① 高速道路上空を夜間に自律飛行しながら安定した映像をリアルタイムで配信
② 高架下を昼間・夜間に飛行しながら安定した映像をリアルタイムで配信
③ ドローンポートから異なるドローンポートを往復する自動離陸、自律飛行、自動着陸(昼間実施)
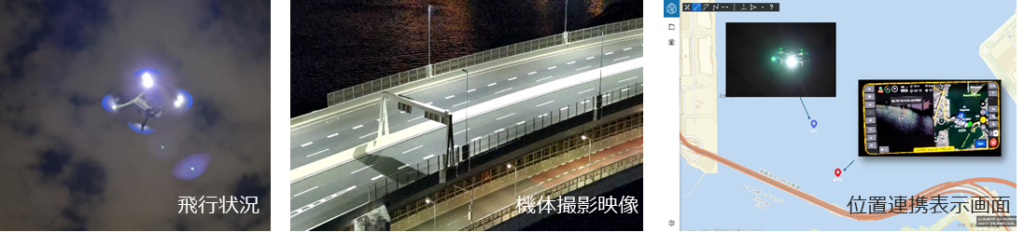
④ 同時に飛行している機体の飛行情報、映像をリアルタイムに取得及び一元管理
※試行検証として、夜間の捜索を想定したドローンに搭載したスポットライト、スピーカからの拡声放送、
対象物のリアルタイム位置特定(NTTコミュニケーションズ)、ドローン映像からのリアルタイム人物検出
(KDDIスマートドローン)を実施
【役割と実証項目】
| 会社名 | 役割 | 使用機体名 | 実証項目 |
| 首都高速道路 | 全体総括 | ||
| 首都高技術 | 安全管理 | ||
| JDRONE | 実証実施者 | Matrice 350 RTK | ① |
| エアロセンス | 実証実施者 | AS-VT01K | ① |
| KDDIスマートドローン | 実証実施者 | Skydio X10/DJI Dock 2(Matrice 3TD) | ①、③、④ |
| NTTコミュニケーションズ | 実証実施者 | Skydio X10 | ①、②、④ |
【検証項目と結果】
| 検証項目 | 検証結果 |
| ドローンおよびドローンポートの適用性 (機体やGPS、通信環境等の確認) | ・GPS や通信は比較的良好で途絶することがなかった。 ・ドローンポート間を往復する実証では飛行はできたものの、 一部映像の通信途絶が見られた。 |
| ドローンで撮影した映像の有用性 (映像精度、現場状況の確認) | ・各映像はリアルタイムに確認することができ、映像は夜間でも 道路状況の概略を把握するには十分であった。 ・高架下の飛行においては、機体性能が十分発揮され、 高精度な映像を確認することができた。 |
| 事前に作成した飛行経路に対する実際の飛行精度 (構造物との適切な離隔保持等) | ・プログラムされた飛行経路から逸脱することなく、 安定した飛行を行うことができた。 |
| 異なる機体の飛行情報の一元管理の可能性 (他のシステムへの伝送確認等) | ・各機体のクラウドから一元管理する他のシステムへの伝送はできたが、 一部映像の途絶・遅延が確認された。 |
【使用機体一覧】
【当日の様子】
■夜間飛行(高速道路上空付近を撮影)
JDRONE撮影

エアロセンス撮影

NTTコミュニケーションズ撮影
■夜間飛行(高架下を撮影)
NTTコミュニケーションズ撮影
■ドローンポートを使用した飛行
KDDIスマートドローン撮影
■飛行情報の一元管理
KDDIスマートドローン撮影

【位置図】

【飛行経路図】
以 上